

Highlight
Robust Humanoid Robot Control (Stephens)
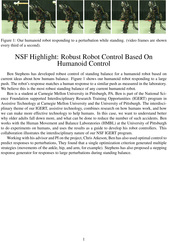
Humanoid robot being pushed
Achievement/Results
Ben Stephens has developed robust control of standing balance for a humanoid robot based on current ideas about how humans balance. Figure~\ref{push} shows our humanoid robot responding to a large push. The robot’s response matches a human response to a similar push as measured in the laboratory. We believe this is the most robust standing balance of any current humanoid robot.
Ben is a student at Carnegie Mellon University in Pittsburgh, PA. Ben is part of the National Science Foundation supported Interdisciplinary Research Training Opportunities (IGERT) program in Assistive Technology at Carnegie Mellon University and the University of Pittsburgh. The interdisciplinary theme of our IGERT, assistive technology, combines research on how humans work, and how we can make more effective technology to help humans. In this case, we want to understand better why older adults fall down more, and what can be done to reduce the number of such accidents. Ben works with the Human Movement and Balance Laboratories (HMBL) at the University of Pittsburgh to do experiments on humans, and uses the results as a guide to develop his robot controllers. This collaboration illustrates the interdisciplinary nature of our NSF IGERT program.
Working with his advisor and PI on the project, Chris Atkeson, Ben has also used optimal control to predict responses to perturbations, They found that a single optimization criterion generated multiple strategies (movements of the ankle, hip, and arm, for example). Stephens has also proposed a stepping response generator for responses to large perturbations during standing balance.
Address Goals
1) Discovery: This is basic research on why humans fall, and how we can reduce the risk of falling.
2) Infrastructure: We are developing a humanoid robot, which can usefully physically simulate humans in many situations.
